Sånn bygger NTNU-studenter selvkjørende racer-elbiler
- Beregner tusenvis av potensielle kjørebaner hvert sekund, forteller studentene som snart skal til internasjonal konkurranse.

Publisert
Visste du at det finnes norske studenter som bygger og koder små selvkjørende elbiler? Ikke vi heller!
Men på NTNU i Trondheim driver en ivrig gjeng og gjør seg klar til verdens største ingeniørkonkurranse Formula Student, hvor de skal delta med elbilen Atmos.
På kort tid skal de kode, designe, trene og bygge en liten kopi av en Formel 1-bil, som skal kunne kjøre ti runder på en bane ingen vet hvordan ser ut på forhånd.
Det krever mye teknologi, kunnskap og forberedelser.

Høyt rangerte norske studenter
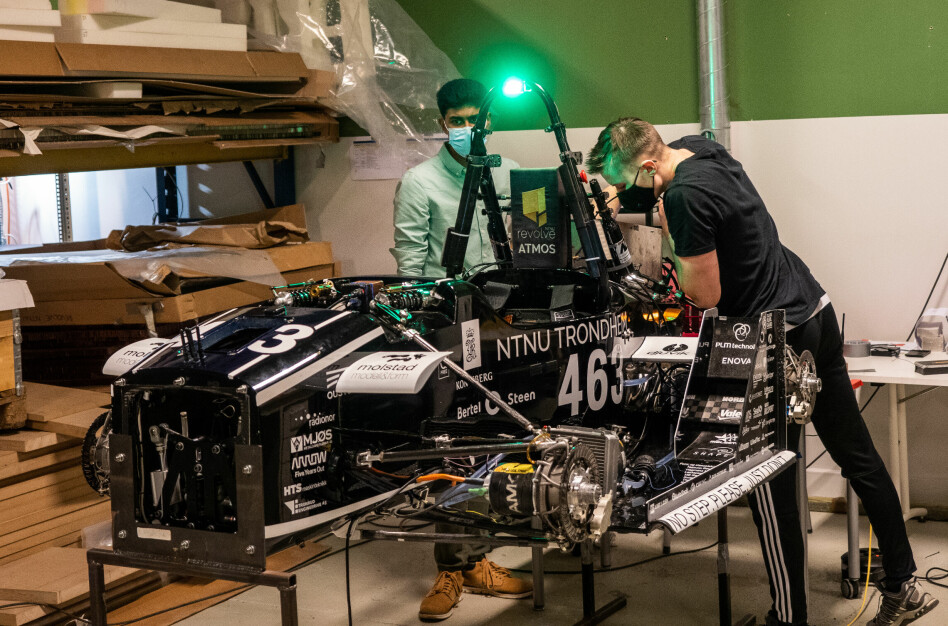
Revolve NTNU kaller de seg, og består av rundt 70 frivillige medlemmer. 20 av dem jobber intenst på årets selvkjørende elbil, Atmos, som bygges helt fra bunn på NTNU.
Og de norske ingeniørene er gode, faktisk er de rangert som nummer 10 i verden av over 200 universiteter.
En av lederne for elbil-prosjektet er 25 år gamle Johan Ludvig Holst, tredjeårsstudent på bachelorstudiet i informatikk. Han leder "driverless"-biten - altså det som har med selvkjøring å gjøre - som sjefsingeniør, hvor alt fra programvare og analyseverktøy til det mekaniske og elektriske rundt bilen blir utformet.

- Alle som er med i Revolve er også fulltidstudenter på siden, og ingen av oss har laget racerbiler eller autonome biler før vi blir med i Revolve. Selv om det ofte er relevant til det vi studerer, blir Revolve som en fulltidsjobb ved siden av studiet, forteller Holst til kode24.
Holst forteller at det er mye lærdom i prosjektet, og mener det vil være gull verdt senere i livet. Det er også en ekstra gulrot, trekker han frem.
Lærdommen blir tungt verdsatt av potensielle arbeidstakere.
Og potensielle arbeidstakere er det flust av. Prosjektet er nemlig fullfinansiert av sponsorer fra over hundre partnerbedrifter over hele Norge.
Streng konkurranse med killswitch
Selve målet for prosjektet er den årlige internasjonale konkurransen Formula Student. Som kanskje høres ut som en racing-konkurranse, men som ifølge gjengen hovedsakelig handler om hvem som er den beste ingeniøren.
I løpet av en rekke øvelser skal den selvkjørende bilen klare seg ti runder på en helt ukjent bane, teste svingeferdigheter, teste akselerasjon ved å kjøre 75 meter fortest mulig, og være mest mulig energieffektiv.

I tillegg må gjengen legge frem en kostnadsplan for utvikling og bygging, forsvare alle designvalg og ha en klar businessplan for kommersialisering.
Ekte dommere fra bilindustrien er med å dømme i konkurransen.
Selve konkurransen defineres av over 150 sider med rammer og regler, og sikkerheten er i høysetet.
- Vi opererer i høye hastigheter med høyspent-strøm, og i visse tilfeller uforutsigbar kunstig intelligens. I selvkjøring har vi alltid med en kill-switch, en stor rød knapp, som aktiveres dersom bilen ikke oppfører seg, forteller Holst.
Karbonfiber og Lithium-ion
Med så mange parametere og konkurranseregler kan det være en overveldende oppgave å skulle bygge sin egen elbil.
Oscar Meisal er 23 år gammel elektroingeniørstudent med spesialisering innen automatiseringsteknikk. På prosjektet er han gruppeleder i Mechatronics, som har ansvar for å videreutvikle og vedlikeholde de mekaniske og elektriske systemene i bilen.

Han forteller at de grovt sett deler opp systemet i det mekaniske og det elektriske.
På den mekaniske siden har man monocoque-en, som er chassiset til bilen. Støpt i karbonfiber og aluminium. Hjulopphenget er 3D-printet i titan. I tillegg kommer vingepakken. Ingen av komponentene er etterlatt til tilfeldigheter.
- Dette er laget på bakgrunn av flere hundre tusen CPU-timer med Computational Fluid Dynamics-beregninger på luftstrømningene rundt bilen. Det aller meste her er egendesignet ned til millimeteren og produsert enten in-house eller hos sponsorer for å veie minst mulig, forklarer Meisel til kode24.

På det elektriske finner man høyspent-komponenter som batteripakken, som består av over 250 lithium-ion-batterier på 600 volt, samt fire motorer som sørger for at bilen akselererer til 100 kilometer i timen på 2,2 sekunder.
- For å oppnå den hårfine balansen mellom ytelse og vekt er også dette designet fra bunn av og støpt i kevlar, det samme materialet man finner i hjelmer og skuddsikre vester, forteller Meisal.
Bilen har også lavspent-elektronikk, slik som overvåking av batteripakken for å beregne riktig pådrag per hjul, og kretskort som overvåker sensordata om alt fra dekktemperatur til hastighet og kraft på demperne.
Eget lokalnettverk i bilen
Men det er ikke bare det elektriske som skaper en selvkjørende elbil. Det er nemlig haugevis av programvare og maskinvare i både Atmos og ved overvåkingsstasjonen.
Kybernetikkstudent Sander Furre, som jobber med de autonome systemene i bilen, forteller at programvaren på bilen er delt inn i flere pakker med forskjellige ansvarsområder, for eksempel tilstandsestimering og sti-planlegging.

- Pakkene er koordinert av rammeverket Robot Operating System og kjøres som meldings-kommuniserende noder på et lokalt nettverk på bilen, forteller Furre til kode24.
Nodene er skrevet i C++ og Python og benytter åpen-kildekode-prosjekter som Eigen og GTSAM. Operativsystemet som brukes er Ubuntu.

For å simulere utstyret på bilen utvikles hele stacken lokalt i virtuelle Docker-containere. Noe Furre forklarer er essensielt for å sikre at alle har likt utviklingsmiljø, og at alt vil funke på bilen.
I tillegg er det software som ikke sitter på bilen. Revolve har nemlig et egenutviklet analysesystem, Revolve Analyze, som overvåker kritiske systemer og analyserer data fra over 300 sensorer på bilen. Dataen analyseres i sanntid mens bilen kjører.
Systemet ble påbegynt i 2017 og er en .NET-basert WPF-applikasjon. WPF skal være valgt på grunn av SciChart-biblioteket som gir ekstremt gode plots og kart, forteller gruppeleder for softwaregruppen Jostein Tysse.
- Når bilen kjører, sendes data over UDP til PC-en med Analyze, og vi ser data i real-time. Man kan også se på data i ettertid, og for eksempel inkludere opptak fra løpet, som i denne videoen, forklarer Tysse.
Beregner tusenvis av kjørebaner
Blant sensorene på bilen finner vi LiDAR-sensorer, som bruker lysstråler til å måle avstand. Tusenvis av stråler sendes ut i bestemte retninger i høy frekvens, hvor hver stråle utgjør et punkt i rommet rundt bilen.
Sammen danner alle punktene et tredimensjonalt bilde rundt bilen, som lar Atmos forstå hvor kjeglene som definerer banen er.
- I videoen over ser vi Atmos gjennomføre en test av øvelsen Trackdrive. Det er 10 runder rundt en helt ukjent bane som kun er definert av kjegler. Målet er å kjøre så fort som mulig, men siden banen er ukjent må bilen finne ut hvor banen er samtidig som den kjører, forteller sjefsingeniør Holst.
I venstre hjørne av videoen vises en representasjon av det bilen ser, og måten den registrerer kjegler på. Et egenutviklet system, SLAM, analyserer data fra LiDAR-sensorene og finner ut om lyset fra dem treffer en kjegle eller ikke.

- Når vi har etablert et initielt kart over det som er rundt bilen, begynner bilen å kjøre samtidig som vi gjør “planning”. I videoen ser det litt ut som det kommer spagetti ut fra bilen oppe i øvre hjørnet under den første runden, men dette er altså bilen som beregner tusenvis av potensielle kjørebaner hvert sekund. De beste valgene blir brukt til å etablere den faktiske stien som bilen velger å følge, forteller Holst.
- Hele første runde er en slags utforskning av banen, og så fort vi har kommet en runde rundt, øker forståelsen av miljøet så mye at vi kan trappe opp farten.
Gjør seg klar til konkurranse
For tiden jobber gjengen med å få bilen testklar i løpet av våren. Målet er å gjøre mer og mer "virkelig" testing, men på grunn av vinteren i Norge har teamet måtte ta til takke med en simulator foreløpig.
Både de autonome systemene og selve bilen må være i tipp topp stand, slik at alle øvelsene kan gjennomføres i konkurransen på sensommeren, derfor håper teamet på bar bakke frem mot sommeren.

Selve gjennomføringen er fordelt mellom Spania, Tyskland og Ungarn, og teamet skal delte både med en selvkjørende variant av bilen, og en med fører.
Holst forteller at over 230.000 arbeidstimer er lagt inn i Atmos-bilen siden starten i høsten 2017, og det er ekstremt viktig for dem at kompetanse overføres til neste års team.

- Hvert år jobber vi for å bli litt bedre på alt, men vi står tross alt på skuldrene til mange årsverk med tårer og svette som har kommet før oss, forteller Holst og avslutter med et lite håp for konkurransetiden fremover.
- Vi krysser fingrene for lite smitte og mye vaksine.

Foretrekk oss i Google Discover
Ved å legge oss til som foretrukket kilde i Google vil du blant annet få opp flere av sakene våre i Google Discover. Tusen takk for støtten!



































